Contact mode
Contact mode is a standard measurement mode of atomic force microscopy (AFM) that can obtain topographic information on a wide range of sample types. Contact mode typically uses cantilever bending for feedback with a relatively low spring constant to avoid sample damage. As the scanner traces the tip across the sample during contact mode imaging, the repulsive contact forces between tip and sample cause the cantilever to bend to accommodate for changes in topography, as shown in figure 1 (a). For more details, please refer to the Lennard-Jones Potential curve in figure 1 (b), which represents the distance dependence of tip-sample interactions. When the outermost atoms of tip and sample are gradually brought closer, they start to weakly attract each other. This attractive force increases until the inter-atomic distance is small enough to trigger the Pauli repulsion between their electron clouds. The strong repulsion quickly offsets the attractive force as the inter-atomic distance continues to decrease. The inter-atomic forces are balanced when the distance between the atoms is reduced to a few angstroms, about the length of a chemical bond.

Figure 1. (a) Cantilever bending due to the repulsive contact forces, and (b) inter-atomic interaction potential U vs. distance r. The blue curve represents a purely repulsive interaction, while the red curve represents a purely attractive interaction. The black curve is a combination of long-range attractive and short-range repulsive interaction forces called the Lennard-Jones Potential. At larger distances, the net force is attractive (-F), which switches to a net repulsive force (+F) when two atoms are brought closer together.
The atoms are in contact when the total inter-atomic force becomes positive (repulsive interaction regime).
As shown in figure 1 (b), the slope of the interaction potential curve is relatively steep in the repulsive regime (U ∝r-12). As a result, the repulsive force superimposes the attractive van der Waals forces. The repulsive tip-sample interaction regime can be identified as an upward bending of the cantilever, which increases in magnitude for higher force setpoints. Depending on the nature of cantilever and sample, a high force setpoint can introduce damage to the surface and/or tip wear.
In contact mode, the cantilever exerts a force normal to the surface and the deflection of the cantilever is proportional to the force applied. At small deflections, the cantilever can be considered as a Hookean spring with spring constant k (units N/m). The magnitude of the cantilever force depends on the spring constant of the cantilever and the setpoint (the reference force for feedback) chosen by the operator. At a given tip-sample separation, the only variable force is the cantilever force. The spring constant of a cantilever can be determined easily on Park AFMs using the thermal tune method. With a known spring constant, the measured deflection (typically in nanometers) can be directly converted to force.
Park AFMs detect the deflection of the cantilever via an optical beam deflection technique. As shown in the schematic diagram in figure 2, an optical beam from a superluminescent diode (SLD) reflects off the back of the cantilever onto a position-sensitive photo detector (PSPD). As the cantilever bends, the position of the beam on the PSPD shifts. The ratio of the optical path length (between the cantilever and the detector) to the cantilever length produces a geometric amplification. As a result, the system can detect sub-angstrom vertical movements of the cantilever.
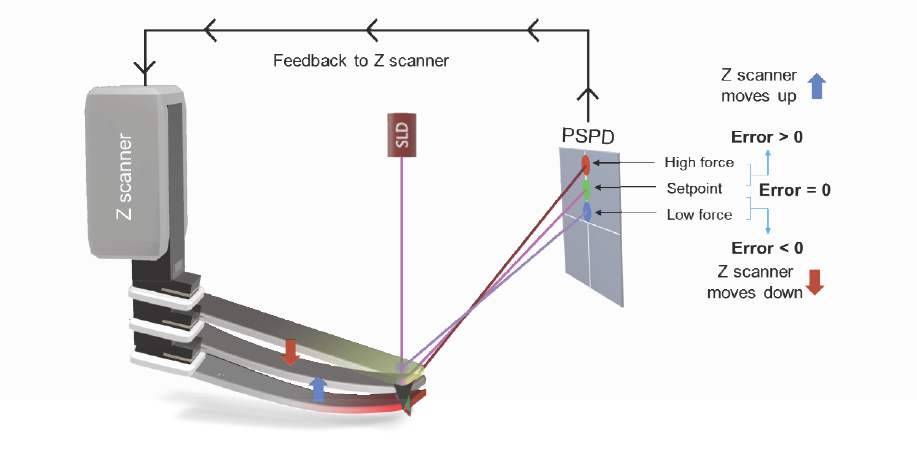
Figure 2. Schematic diagram of experimental setup for Contact mode AFM. Cantilever deflection from the default (setpoint) position is registered as shift of the optical beam spot on the PSPD. Error signal is used as a feedback for the Z scanner motion to restore the setpoint value. Z scanner’s response to the error signal is recorded as the topography image (while scanning in x- and y-direction).
During Contact mode scanning, the deflection of the cantilever is kept constant at a target value (so-called setpoint). A Z feedback readjusts the height of the Z scanner to maintain the setpoint. The error signal in Contact mode represents the difference between setpoint and vertical displacement of the beam spot on the PSPD as input for the feedback (figure 2). A schematic diagram of Contact mode measurement is shown in figure 3. Based on the error signal, the feedback changes the Z scanner position to accommodate for the topography change. The AFM topography is then generated based on the motion of the Z scanner. Since the cantilever deflection is kept constant during measurement, the total force applied to the sample is constant as well. The scan speed in Contact mode dependents on the Z feedback that tracks the topography. Park AFMs use a high-speed Z scanner and a low noise signal processing controller to effectively attain high speed contact imaging with optimal quality.
An example of Contact mode imaging is presented in figure 4. In-situ Contact mode AFM in liquid was used to monitor the morphology change of calcite crystal growth. The (104) cleavage plane of calcite was imaged in a 45 μm by 45 μm overview scan right after the exposure to the Ca(OH)2 solution as shown in figure 4 (a). Then, subsequent 500 nm by 500 nm scans in Contact mode visualized the crystal growth of calcite surface over 60 minutes in the Ca(OH)2 solution.

Figure 3. Schematic diagram of the experimental setup for Tapping mode. The phase shift between the detected cantilever oscillation and the drive signal gives a contrast between different materials and therefore carries additional information on the material distribution in the sample.
While scanning in Contact mode, the cantilever applies large shear forces that can damage the samples and/or the tip apex. Particularly delicate samples such as adsorbed molecules, biological samples, and soft polymers, benefit from Non-contact mode for topography imaging. Since Non-contact mode operates in the attractive force regime, shear forces are avoided, which significantly increases the tip lifetime. Therefore, Noncontact mode is generally recommended for topography imaging (see “Non-contact mode note” for more details). Nonetheless, various advanced AFM techniques have been developed on the basis of Contact mode as they require a constant tip-sample contact to measure additional surface properties, including conductivity, resistance, capacitance, piezoresponse, and thermal behavior.
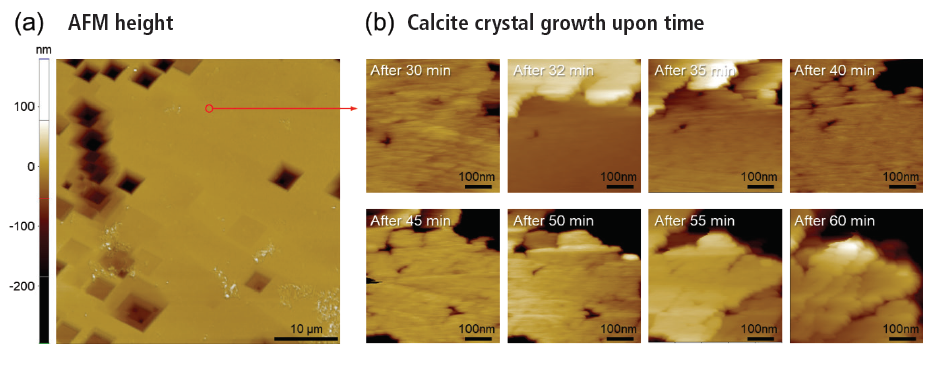
Figure 4. (a) AFM height of overview scan on the (104) calcite crystal plane, and (b) detail scans for in-situ imaging of calcite crystal growth in dependence of the exposed time to Ca(OH)2 solution.